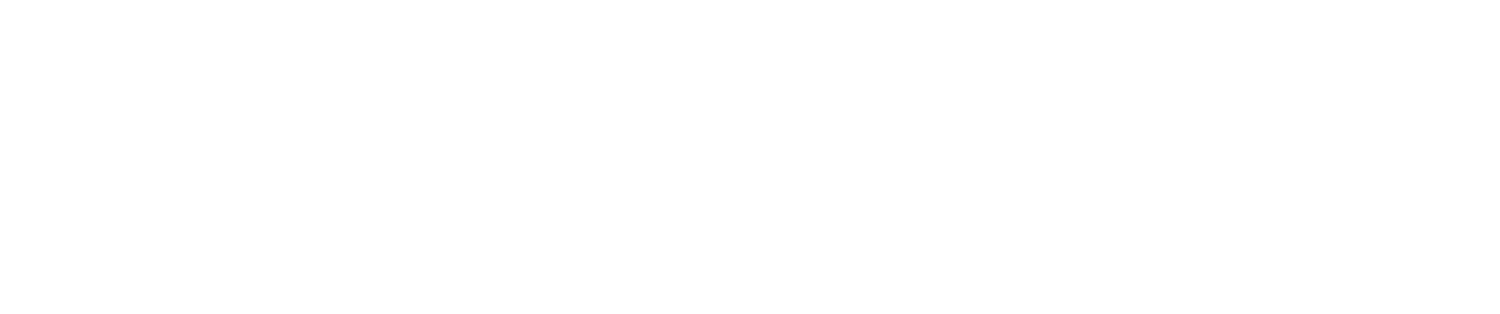
Boat Overview

Motor pod
The Minion ASV achieves propulsion with Copenhagen Subsea VM RDP (rim-driven propellers). These are a special type of marine electric motor in which a brushless motor is built around the propeller. This increases efficiency and minimizes the risk of snagging or interfering with wildlife. The RDPs can be azimuthed +/- 85 degrees using Volz DA30 servos, greatly improving the ASV’s agility. The RDPs can also be automatically retracted from the water with Linak LA36 linear actuators, reducing the human intervention required when launching, retrieving, and beaching the ASV. This propulsion system is packaged in custom aluminum motor pods, filled with closed cell expanding foam for buoyancy.

MODULAR RAIL
Minion ASV’s payload tray has been upgraded to realize the goal of a more useable autonomous research platform. To do this a modular rail system has been installed around its perimeter. This rail uses the ubiquitous picatinny mounting system to ensure easy installation and secure attachment, allowing for the tool-less installation of hardware with no modification to Minion.

HYDROPHONE
Minion has a hydrophone array to detect acoustic underwater pingers. The hydrophone array consists of a diamond shaped, planar array of four Teledyne Reson hydrophones. Signals are amplified and sampled before being processed in software. To deploy the array, a linear actuator is used to rotate the array and pole mount 90 degrees downward into the water. The mounting pole serves to lower the array deep enough to limit the impact of surface reflections.

MAST
The MAST (Minion Autonomous Systems Tray) furthers the concept of a modular and upgradable Minion ASV. This system consists of support and mounting for Minions batteries, ESC’s, control board, expansion bay, and computer hardware. These systems are readily accessible, upgradable, and removable using only a single tool. MAST lowers Minions overall CG, while allowing ample storage for equipment atop the deck. Equipment can be mounted to the deck using the pre-drilled, threaded bolt pattern.

Perception SUITE
The hardware of the Minion perception suite is responsible for detecting and characterizing waterborne objects. Primary sensing is provided by four Lidar sensors providing up to 1.6 million data points per second. The location and orientation of these sensors optimizes return density on objects to the port, starboard and bow of Minion. Lidar data is fused with imagery from two 100-degree field-of-view, 5MP cameras for improved object detection and characterization.
Minion UAS

The Minion ASV now works in tandem with a custom built UAS for use in the 2022 Maritime RobotX Challenge. The team’s UAS is capable of taking off from the deck of the Minion ASV to gather visual and spatial data of the environment. The Minion ASV is able to use this additional information for mapping of its environment and operation conditions.
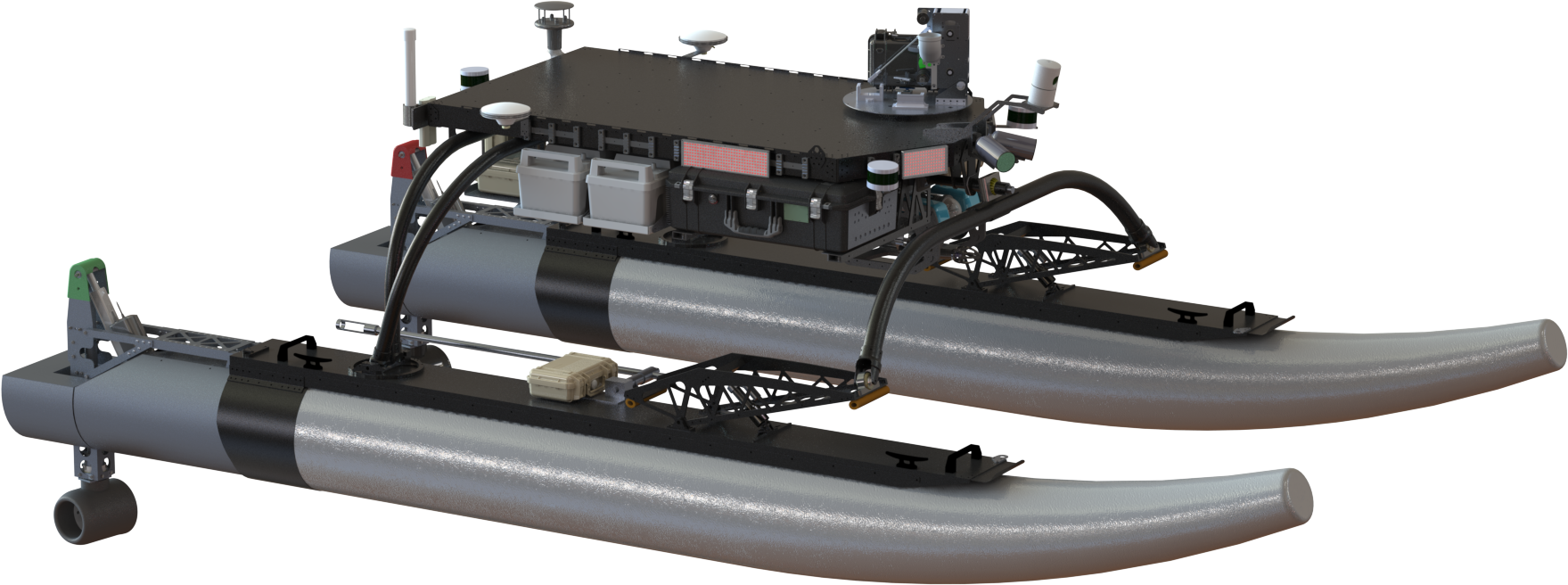
Racquetball Turret
The 2018 Minion ASV Racquetball Turret builds upon the lessons learned from developing a turret in 2016, creating a more robust and logisticially simple system that is easier to manufacture, operate, and maintain. The turret features self-contained power and control systems, giving it the ability to be a drop-in addition to the deck of the WAM-V when the competition demands it.
Software Architecture
The 2022 Minion Software Stack takes full advantage of the many sensors the team has integrated. With the increased capabilities from switching to ROS, Team Minion has developed their most robust competition software yet. The Task Manager is the star of the show, handling the decision making based on information from the task nodes. Each task node sends a bid to Task Manager based on their perceived ability to complete their task. Once Task Manager deems a task to be ready, Minion will be given the green light to attempt that task autonomously.
